Barcode
Detect & decode the barcode. Orientation is derived from the result — if the barcode reads correctly the bottle is upright; if not, it's flipped.
Project Beacon · capabilities showcase

People movement at scale · 3D scans of real environments · robot, conveyors, sensors on the scan.
Inline inspection deployed with HiRoll Technology. Three detection methods running concurrently on a single NVIDIA Jetson edge unit — plug-and-play on the line, no programming required.
Detect & decode the barcode. Orientation is derived from the result — if the barcode reads correctly the bottle is upright; if not, it's flipped.
Analyses the bottle's silhouette to determine which side the handle and cap face — at line speed, no fiducials required.
Top-view colour segmentation isolates the bottle body and cap. Robust under variable line lighting.
GenSet Analytics — a camera and Jetson box mounted on the rig deck, watching four diesel generators and reporting each one's load class every five seconds. The same edge-CV discipline AME needs for inline anomaly detection at AMP2.
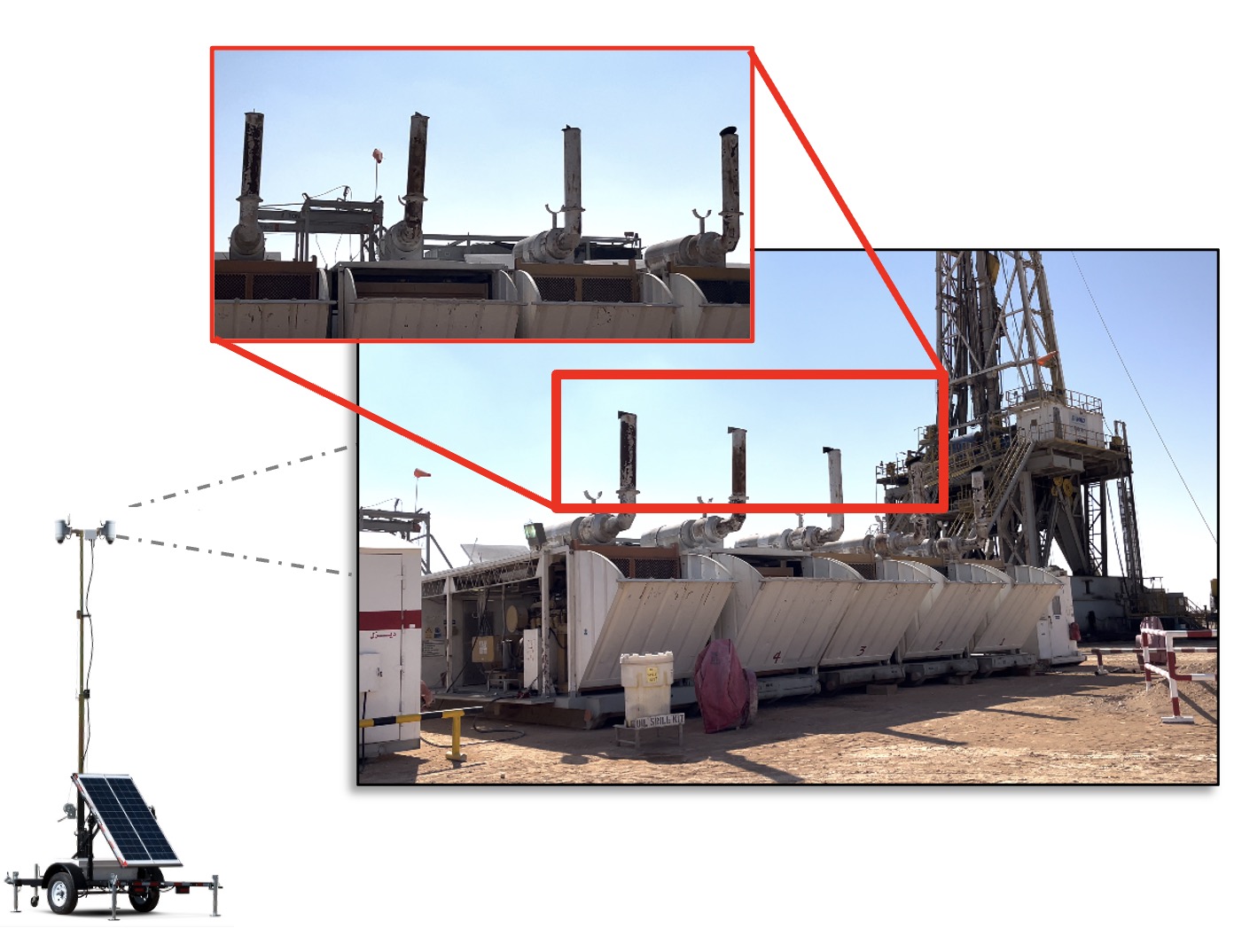
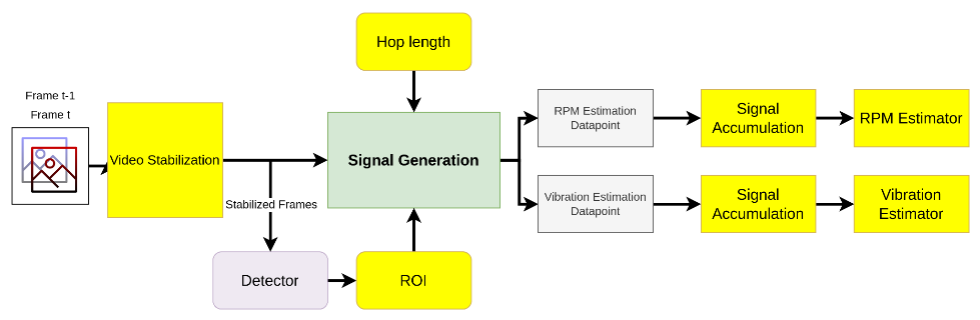
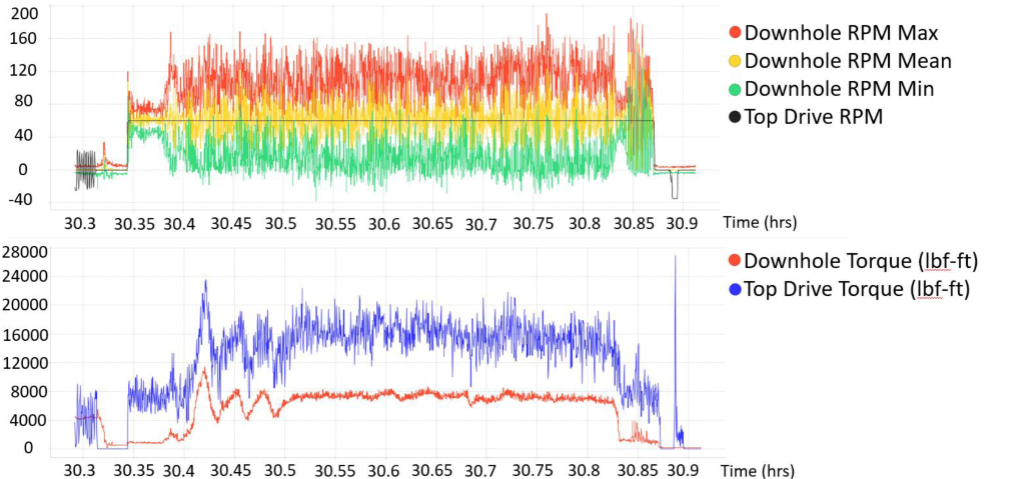
Same edge-CV camera, different inference: video stabilisation → ROI tracking → signal generation → downhole RPM and vibration estimates. Stick-slip and twist-off events surface on a dashboard without putting any new sensor downhole.
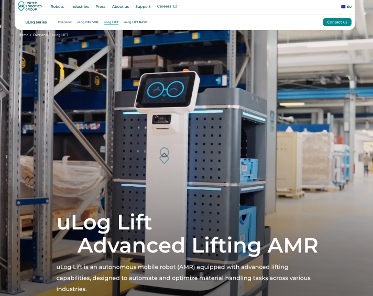
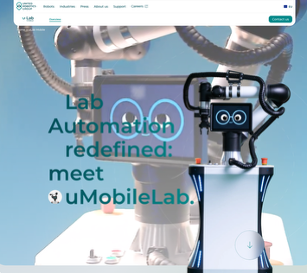
KAUST robotics collaboration with United Robotics Group (Germany) — a unified portfolio spanning autonomous mobile robots, lab-automation manipulators, and a humanoid programme. Direct pathway into Beacon §3.2 (humanoid & advanced robotics).